基于NE555的鱼缸自动水位控制电路设计与分析
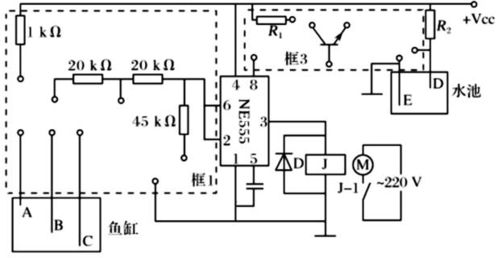
在观赏鱼养殖或家庭水族箱管理中,维持水位的稳定至关重要。水位过低不仅影响观赏效果,更可能危及鱼类生存。本文基于NE555时基集成电路,设计一种简单、可靠、低成本的鱼缸水位自动控制装置,其核心目标是:当水位低于预设的下限(如图1中的b点)时,自动启动电动机抽水;水位恢复到安全范围后,自动停止抽水。
一、 系统工作原理与NE555功能概述
整个控制系统的核心是NE555集成电路。NE555是一种极富盛名且应用广泛的模拟-数字混合集成定时器芯片。根据图1中提供的输入输出关系表,我们可以将其在本次设计中的工作模式理解为一种施密特触发器(双稳态模式) 或由外部传感器触发的单稳态模式的变体应用。其核心特性是:输出状态(高电平或低电平)由特定引脚(如触发引脚TRIG和阈值引脚THRES)的电压与内部参考电压的比较结果决定,具有滞回特性,可以有效防止水位在临界点附近波动时电机的频繁启停(即“抖动”)。
在本设计中,我们将水位探测点(如图1中的a点和b点)作为传感器。通常,a点设置为水位上限探测点,b点设置为水位下限探测点。水位本身作为可变电阻或开关使用:当水位淹没电极时,电极间通过水导电,电阻很小;当水位离开电极时,电极间开路,电阻极大。
二、 电路设计思路与连接方案
- 水位传感部分:
- 使用三根导电探针(或金属电极)垂直插入鱼缸。一根公共端(例如接电源Vcc),另外两根分别对应高位点a和低位点b。
- b点是控制关键。当水位高于b点时,b点探针与公共端通过水导通,使连接b点的电路节点(通常连接到NE555的触发引脚,如第2脚)处于一个特定的电平(例如高电平)。
- 当水位低于b点时,b点探针与公共端之间断开,该节点电平被上拉或下拉电阻改变(例如变为低电平)。这个电平变化将作为NE555的触发信号。
- NE555核心控制部分:
- 将NE555配置为单稳态模式或一种特定的比较器模式。这里更常用的是利用其触发引脚(2)和复位引脚(4)。
- 设计要点:
- 触发条件:水位低于b点 → b点电极断开 → 触发引脚(2)电压降至低于(1/3)Vcc → 符合触发条件。
- 输出动作:一旦触发,NE555输出引脚(3)立即从低电平跳变为高电平,并维持一段时间(由外部RC电路决定,或在本水位控制中,我们希望维持到水位恢复,因此需要结合a点进行复位)。
- 复位/停止条件:输出高电平驱动继电器或晶体管,使电动机开始抽水。水位随之上升。当水位淹没a点时,a点电极导通,可以将一个信号(例如高电平)送至NE555的复位引脚(4)。当复位引脚(4)收到有效信号(低电平有效复位时接低电平,高电平有效时接高电平,需根据电路设计),NE555输出立即复位为低电平,电动机停止工作。
- 另一种更优的设计是使用双探头(b点和公共端)结合NE555的施密特触发器特性。将b点信号送至触发端。当水位低于b,触发输出高电平驱动电机;当水位上升,虽然重新淹没b点,但由于施密特触发器的滞回特性,输出不会立即改变,直到水位上升到远高于b点(由另一个电阻分压点设定,替代了物理a点)或通过一个延时电路后才停止,这样可以确保每次补水都有足够的量,避免电机短时间循环启停。
- 执行机构部分:
- NE555的输出引脚(3)驱动能力有限(约200mA),不能直接驱动大功率水泵电机。
- 需要使用一个晶体管(如NPN型三极管) 或继电器模块作为驱动开关。当NE555输出高电平时,晶体管饱和导通或继电器吸合,使水泵电机通电工作;输出低电平时,晶体管截止或继电器释放,电机断电停止。
- 必须注意:在与交流市电驱动的水泵连接时,务必使用继电器进行电气隔离,确保控制电路的安全。
三、 集成电路设计
基于NE555的鱼缸水位自动控制电路设计,巧妙地将水位变化转化为电信号,利用NE555稳定的触发与复位功能,控制执行机构的通断。其核心逻辑映射如下:
- 输入状态(水位低于b点):触发 → 输出动作(OUT=High):电机运行。
- 复位条件(水位达到a点):复位 → 输出动作(OUT=Low):电机停止。
这种设计结构简单、成本低廉、抗干扰能力较强(得益于NE555的滞回特性),非常适合家庭或小型鱼缸的水位自动维护。在实际制作中,需要仔细调整探测电极的位置、上拉/下拉电阻的阻值以及可能用到的RC定时参数,以确保系统稳定可靠地运行。
如若转载,请注明出处:http://www.kclgames.com/product/48.html
更新时间:2026-02-24 14:09:05